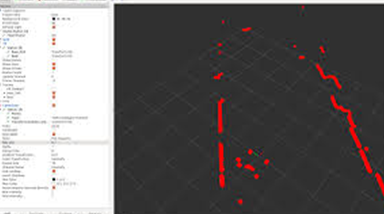
4주차. 라이다를 이용한 슬램 테스트 환경 구축 및 테스트 4주차에는 3주차에 이어서 SLAM테스트를 위한 환경을 구축하였다. 라이다를 통해 맵을 그리기 위해서는 RVIZ 프로그램을 사용한다. 사진1. RIVZ 프로그램(ROS-visualization) 사진1과 같이 라이다가 주변의 맵을 그려 사람이 볼수 있게 해주는 프로그램으로 3주차 까지는 단순 “레이저포인트“(빨간색점) 만 확인이 가능하였다. 이번 4주차에는 여기에 실제 맵을 적용하여 더 현실감있게 해주기 위해 오픈소스인 (3주차에 소개한) Cartographer를 설치하여 진행하였다. 이 라이브러리는 의외로 설치가 간단히 진행되었다. 하지만 unix상 설치 경로가 꼬여서 의도치 않은 오류사항이 발생하여 시간이 소모되었다. 사진2. cartogra..