일전의 jetbot을 이용한 ros 프로젝트가 생각보다 단기간이라 생각이 들게 되어 이번기회에 조금 길게 잡을 수 있는 프로젝트로 하기위해서 새로운 카메라를 입수 하게 되었다.
그것은 바로 인텔에서 판매중인 뎁스 카메라인 D415!!
오늘은 해당 프로젝트를 하기전에 이 카메라가 어떤 녀석인지 알아 보고자 한다.
보통 우리가 일반적인 카메라를 생각해보면
피사체에서 반사되는 빛을 렌즈로 받아 이미지센서가 해당 빛을 받아서 데이터로 처리하고 이를 이미지 신호 처리 장치(ISP)에서 우리가 아는 사진 또는 동영상으로 변환 하며 우리는 그중에 처리된 이미지를 가지고 이것저것 다루는 것이다.
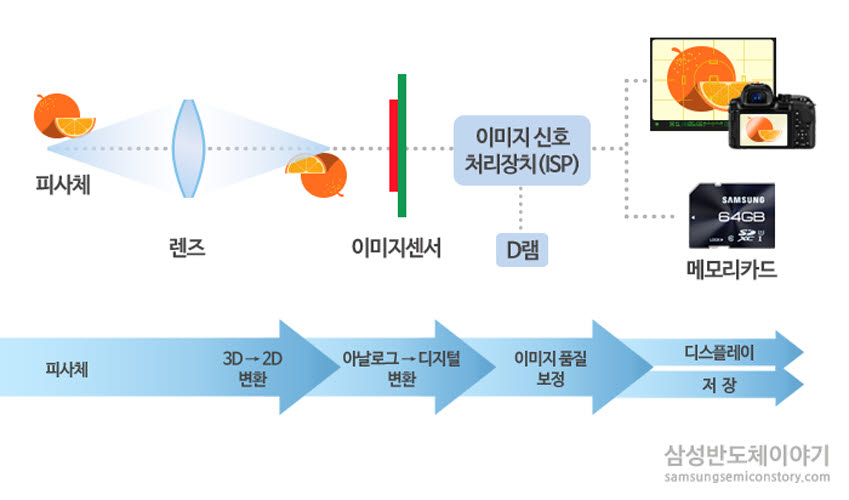
말 그대로 이미지는 2D로 그저 색을 표현할 뿐이 였다.
그렇다 보니 우리가 흔히 표현에 사용하는 보케나 인물 사진 전용 모드를 사용할 때 하나의 카메라로 받아오는 이미지 데이터만을 가지고는 여러 이미지 처리에서는 한계가 보인 것이다.
예를 들어, 사물을 입체적으로 찍고 표현함을 넘어 같은 위치 내에서 다른 높이 또는 깊이를 측정하는 실내 맵칭, 증강 현실 구현, 사람의 몸짓 또는 동작을 인식 하는 분야 에서 일반적인 카메라에서 많은 한계를 느낀것이다.
그렇게 등장하는 것이 이번에 내가 입수한 Depth 카메라가 바로 이분야에서 부딪힌 문제를 해결하기위해서 등장한 방식중 하나이다.
보통 깊이를 인식하는 기술은 크게 스테레오 (stereo-type), Tof(Time-of-Flight),Structured Pattern등
3가지 방식이 대표적으로 이들을 합쳐서 각 장단점을 보완시킨 하이브리드 방식도 존재한다.
이번에 사용하는 제품인 D415의 경우에는 스테레오 방식에 해당한다.
해당 방식은 두 개의 2D 이미지 센서를 결합해서 만든 입체 영상으로 현재 가장 일반적인 3D 깊이 인식 센서 방식이다. 측정 대상과의 거리를 측정하기 위해 한 쌍의 거의 동일한 카메라를 사용하여 카메라들 사이의 시점 불일치를 이용한다. 이 접근법에서 두 카메라의 시선 중심은 깊이 측정에 필요한 시차를 생성하기 위해 기준선 또는 IPD(inter-pupillary distance)로 구분하며, 일반적으로 카메라의 광학축은 서로 평행하고 원근감이 있는 평면과 직각을 이룬다.
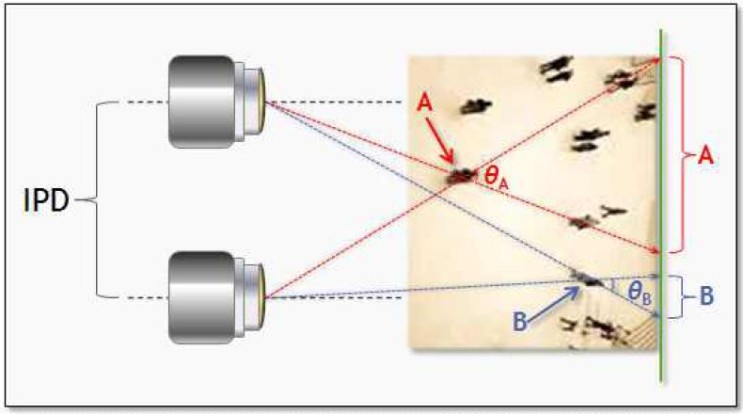
주어진 피사체 거리에 대해, IPD는 카메라 쌍에 의해 보이는 바와 같이 피사체의 간도 간격의 각도를 결정하고, 따라서 시차 검출에 중요한역할을 수행한다고 생각해도 무방하다. 효과적인 깊이 차별이 가능한 작동 범위를 규정하며, 다양한 피사체의 거리에서의 깊이 해상도 한계에도 영향을 미친다.
더 자세한 원리나 사항은 해당 카메라를 사용하면서 프로젝트란에 추가 해볼예정이다.
우선 언박싱하면 다음과 같은 구성을 확인 할 수 있다.

단순하게 카메라만 있어서… 처음에는 이게 비싼거라 아무것도 없는거야… 그런걸꺼야… 했는데..

다행히도(?) 무려 삼각대가 포함 되어 있다! 겸사 케이블도 있다.
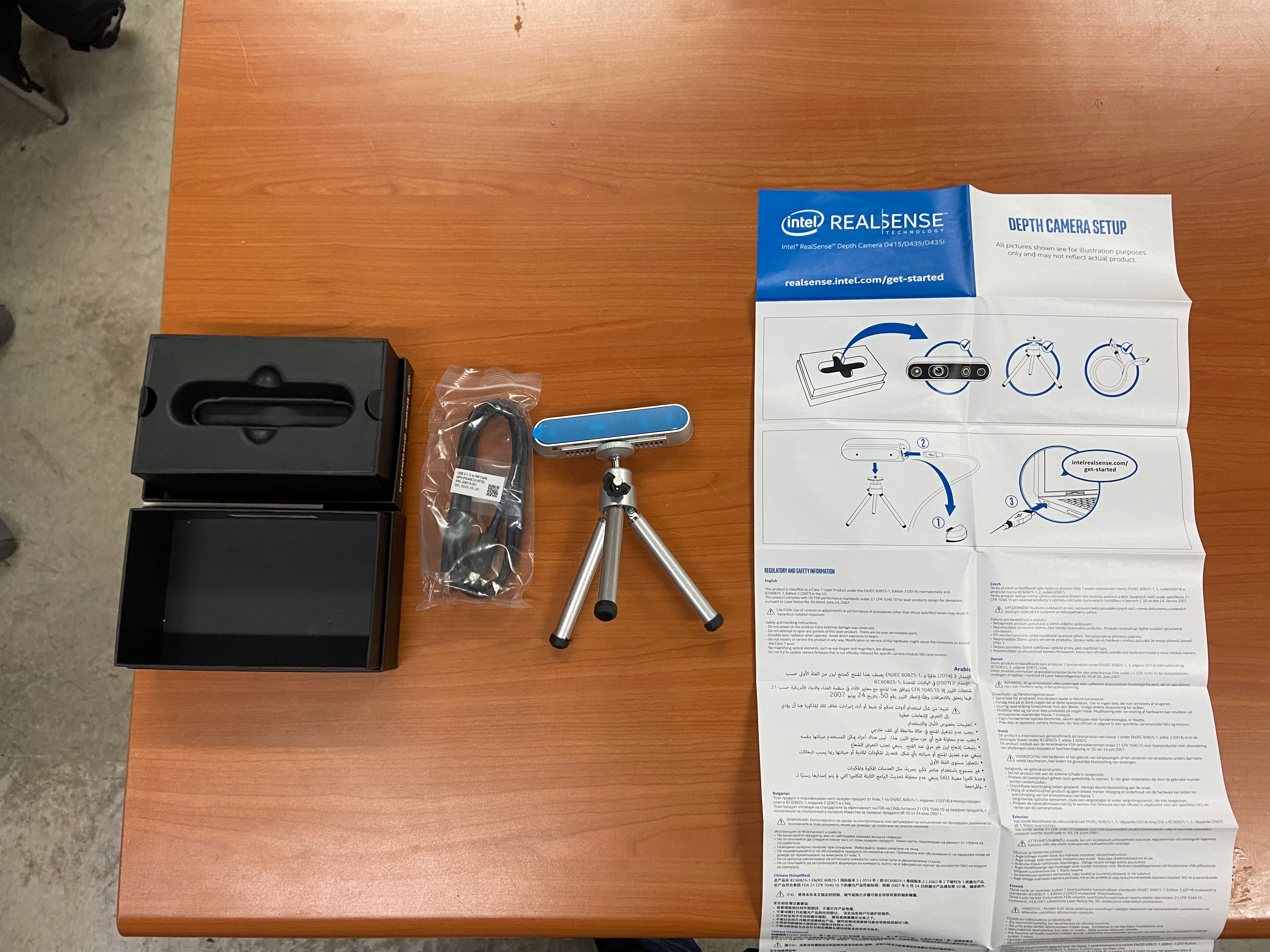
구성은 다음과 같다. 그리고 삼각대를 장착하면 생각보다 멋지게 생겼다.


카메라를 테스트 하거나 할때 매우 편리 하게 사용이 가능 할 것 같다.
연결 같은 경우는 뒷쪽의 커버를 제거 하면 다음과 같은 커넥터를 확인 할 수 있다.

등짝! 등짝을 보자!!!

스테레오 카메라는 것을 알 수 있듯이 복수개의 카메라가 달려 있는 것을 볼 수 있다.
오랜만에 다시 등장한 jetbot 이번엔 제대로 프로젝트를 진행해보고자 아싸리 포맷도 하고 이렇게 장착 해보니… 저거 카메라 다시 설치 할거 생각하니 앞이 캄캄해진다….
카메라 개봉기는 여기 까지 이며 나중에 사용기는 linux 환경에서 테스트 해보면서 올려보고 나중에 ROS에도 적용 해보자!(이번엔 제대로 성공하길.. 또르륵…)
'구매한 제품리뷰 > 전자 기기' 카테고리의 다른 글
| 알리발 Baseus-USB docking station 리뷰 (0) | 2022.03.15 |
|---|---|
| 알리발 6 IN 1 Docking station M.2 Enclosure 후기 + nvme ssd 1TB (0) | 2022.03.14 |
| 저가형 스피커 리뷰 (0) | 2021.12.01 |
| Wowstick 구매 리뷰기 (내돈내산) (0) | 2021.11.30 |
| 알리발 헤드셋 EDIFIER W820NB (0) | 2021.10.23 |