3주차. 라이다를 이용한 슬램 테스트 환경 구축하기 앞서 구입한 JETBOT에 X2 LIDAR을 올려두어 로봇이 움직이는 동안 라이다가 돌며 주변 지형지물을 Mapping할 수 있게 해주었다. 이제 하드웨어 적인 부분은 2주차를 마무리로 종료되었고 3주차 부터는 소프트웨어 설치 및 실험을 진행할 예정이다.
1. NANO JETSON에 ROS(Robot Operating System)설치 먼저 라이다등을 구동시키기 위해서는 기본적인 프로그램들을 설치해 주어야한다. 이떄 가장 많이 쓰이는 오픈소스 프로그램은 ROS로 로봇응용 프로그램을 개발할 때 필요한 라이브러리를 제공해 주어 매우 유용하다. 하여 우리는 여기에 YDLIDAR ROS PACKAGE V.1.4.1을 사용하여 설치를 진행 하였다.
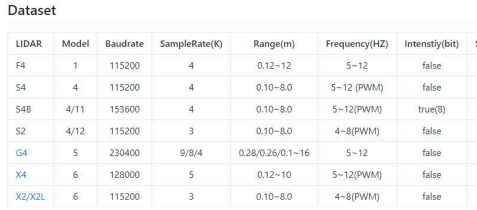
설치 진행 전 확인 해 봐야할 것으로 Dataset에서 나오는 LIDAR 모델의 Baudrate 등의 데이터 들이다. 위 데이터셋에 제공되는 수치에 맞게 설정해주지 않으면 정상적으로 작동되지 않아 주의 가 필요하다.
2. Cartographer Cartographer는 ROS를 도와 2D와 3D 를 실시간으로 localization하고 mapping하는 오픈 소스로 라이다를 제어하는데 유명한 라이브러리이다. 하여 우리는 ROS가 로봇을 제어하는데 사용되는 오픈소스 라이브러리라면 라이다를 제어할 수 있는 Cartographer를 사용할 것이다. P-커리어캐치Ⅱ ( 3 )주차 보고서 성명(학번): 박재완(201533926) 임효석(201533848) 현재 ROS와 Cartographer가 같이 지원되게 하며 다양한 형태로 플랫폼을 이용해 자율주행을 시도할 수 있게 되었다.
3. SLAM
슬램은 다양한 센서(라이다, IMU, camera)들의 data를 결합하여 센서의 위치를 계산하고 지도화한다. 예를 들어 내가 서있는 위치에서 벽과의 거리를 계산하며 이 계산된 거리들을 남겨 둔다. 이 후 내가 앞으로 움직이고 벽이 움직이지 않는다면 같은 벽으로부터 계산된 우리의 새로운 위치를 측정할 수 있듯 생각하면 된다.
4. 소프트웨어 설치 진행 사항
우리는 조립한 JETBOT에 ROS에서 제공하는 SDK와 DRIVER를 설치하는데 여러 가지 오류사항 때문에 꽤나 많은 시간을 소비하였다. 먼저 JETSON NANO에 라이다가 연결되었는지 확인을 해주었다.
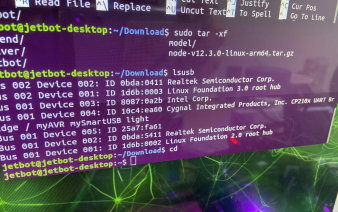
이후
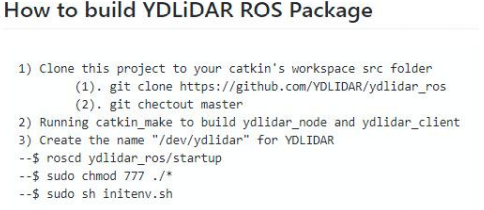
공식 홈페이지에서 제공하는 진행 사항을 따라하여 설치를 진행하였고 그 과정에서 많은 오류를 직면하게 되었다.
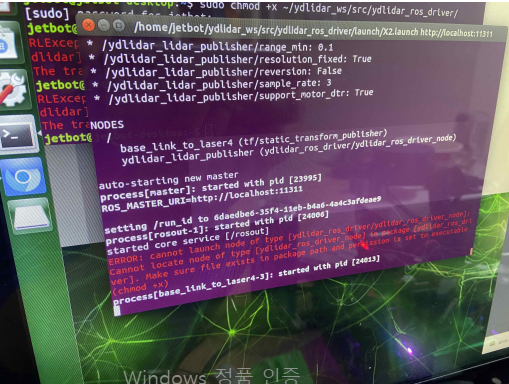
가장 대표적으로 현재 연결된 라이다를 소프트웨어에서 인식하지 못하여 발생하는 문제점이 가장 컸는데, 폴더명과 파일명을 같은 경로상에 위치해 주지 않았기에 발생하는 에러였다.
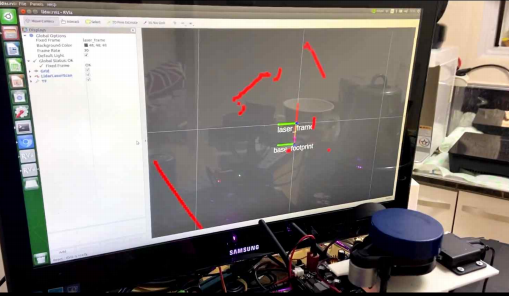
이후 자잘한 오류 같은 것을 잡아주고 최종적으로 실행 하였을 때 JETSON NANO에서 X2 LIDAR가 정상적으로 작동되는 것을 확인할 수 있었다.
5. 4주차 진행 사항
이제 4주차에는 작동되는 라이다를 이용하여 주행을 해보고 정해진 트랙(방)을 매핑하는 과정을 지켜보고 이를 어떤식으로 학습을 할 수 있을지 확인해 본다.
참고자료
윤태진, 김민구, 김민, 문동호, 이상학. (2020). SLAM알고리즘과 LiDAR를 이용한 자율주행 로봇 개발. 한국컴퓨터정보학회 학술발표논문집 , 28(1), 289-290.
옥용진, 강호선, 이장명. (2020). 모바일로봇의 정밀 실내주행을 위한 개선된 ORB-SLAM 알고리즘. 로봇학회 논문지, 15(3), 205-211
'미니 프로젝트 도전기 > jetbot 프로젝트' 카테고리의 다른 글
| JETBOT 프로젝트 4 (8) | 2021.02.18 |
|---|---|
| jetbot 프로젝트2 (6) | 2021.02.16 |